
بررسی طراحی چرخ بیمارستانی در تختهای بیمارستانی موتوری
چکیده – ساختار انواع چرخ و مکانیزم
تختهای متحرک برای جابجایی بیماران در بیمارستانها بخش مهمی از سامانه مراقبتهای بهداشتی هستند. تختهای بیمارستانی معمولی معمولاً نیاز به نیروی انسانی قابلتوجه دارند و بارهای فیزیکی بر مراقبان و پرستاران تحمیل میکنند. این مقاله راهکارهای بالقوه برای بهبود قابلیت حرکت تخت بیمارستانی را بررسی میکند و تمرکز آن بر یکپارچهسازی فناوریهای رباتیک است.
این مقاله شامل مطالعات روی ساختار طراحی تخت، ملاحظات ارگونومیک و پیادهسازیهای رباتیک میشود. انواع مختلفی از چرخ بیمارستانی مناسب برای حرکت رباتیک بررسی شدهاند که شامل این موارد است:
چرخهای معمولی
امنیویل (omniwheel)
چرخهای مکانوم Mecanum
ماژولهای swerve
چرخ پنجم موتوری
در هر نوع چرخ توصیف و مزایا و معایب آن برجسته شده است. مقایسه انواع چرخ کمک میکند تا گزینه مناسب برای اصلاح تختهای بیمارستانی با حفظ مانورپذیری شناسایی شود. علاوه بر این، مقاله از کاربردهای رباتهای متحرک در صنایع دیگر مانند وسایل هدایتشونده خودکار (AGV) و رباتهای متحرک خودران (AMR) الهام میگیرد، تا نوآوریهای بالقوه برای حوزه سلامت بررسی شود. با بهرهگیری از فناوریهای رباتیک، بیمارستانها میتوانند کارایی را افزایش دهند و بار کاری کارکنان را کاهش دهند.
کلمات کلیدی: تخت بیمارستان، اتوماسیون، چرخ بیمارستانی، رباتیک، رباتهای متحرک
مقدمه
تختهای بیمارستانی همواره نقش حیاتی در سیستم بهداشت و درمان داشتهاند و بهعنوان ابزارهایی برای درمان و حملونقل بیمار به کار میروند. این کار میتواند ناکارآمد، وقتگیر و نیازمند نیروی انسانی چشمگیر باشد. علت اصلی این مشکل وزن زیاد و ابعاد بزرگ تخت به همراه وزن بیمار و تجهیزات متصل به تخت است. معمولاً جابهجایی ایمن یک تخت بیمار بین دو تا چهار اپراتور نیاز دارد.
مطالعات نشان دادهاند که کارهای جابهجایی دستی بیماران، بهویژه در انتقال بیماران، فشار فیزیکی زیادی بر مراقبان وارد میکنند و با اختلالات و درد ناحیه کمر ارتباط قوی دارند. با توجه به این مخاطرات، ضروری است بیمارستانها در فناوریها و روشهایی سرمایهگذاری کنند که بار کارکنان را کاهش دهند و درمان بیماران را بهبود بخشند.
ایده کاهش تلاش لازم برای حرکت تخت بیمار موضوعی است که از مدتها پیش مورد توجه قرار گرفته است. پژوهش برای تقویت ویژگیهای تختهای بیمارستانی از دهه 1990 آغاز شده است، اما بیشتر این تلاشها بر ساختار طراحی و جنبههای ارگونومیک جهت افزایش راحتی بیمار و مراقب متمرکز بودهاند. آزمایش Petzäll و همکاران نشان داد که هیچ آرایش سادهای از چرخها نیازهای حرکت در راهروی مستقیم و مانور در فضاهای کوچک را همزمان پوشش نمیدهد؛ بنابراین بهبود صرف ساختار کافی نیست. رویکرد منطقیتر افزودن مکانیزم کمکی یا معرفی رباتیک برای حذف نیاز به اپراتورها است. مطالعات رباتیک نشان میدهد پیادهسازی رباتیک در تختها میتواند بار عضلانی اپراتورها را کاهش دهد. در حال حاضر محصولات تجاری در حال توسعهاند، مانند کیت چرخ پنجم موتوردار قابل نصب بر تختهای چهارچرخ (Electrodrive, Hospimek) و ابزارهای موتوردار جابجاکننده تخت که توسط شرکتهای مختلف تولید میشوند. یک راه حل دیگر استفاده از بازوی رباتیک برای جابجایی بیماران است که در طی سال ها به دلیل مشکلات مربوط به تامین بودجه نادیده گرفته شده است.
هدف مقاله بررسی راهحلهای بالقوه برای مسئله قابلیت حرکت تخت بیمارستانی است. تمرکز بر بررسی و تحلیل مطالعات و راهحلهای موجود در این حوزه و بررسی انواع سیستمهای چرخ است که میتوانند در طراحی تخت ادغام شوند. روششناسی شامل بازبینی انواع چرخهای رباتیک و کاربردهای کنونی آنها در حوزه سلامت و صنایع دیگر است.
اصول کلی رباتهای متحرک برای تخت بیمار
رباتهای متحرک، خودگردان یا نیمهخودگردان، برای حرکت در محیطهای مختلف طراحی میشوند و کاربردهایی از کارهای خانگی تا وظایف صنعتی دارند. اصل کار این رباتها مبتنی بر حسگرها، سامانههای کنترل و عملگرها – محرک ها برای ناوبری و تعامل با محیط است. حسگرهایی مانند LIDAR، دوربین و سنسورهای آلتراسونیک محیط را درک میکنند و دادهها توسط سامانه کنترل پردازش شده و تصمیمات حرکتی گرفته میشود. سامانههای حرکتی شامل چرخها، زنجیرها یا پاها برای جلو راندن ربات و دستکاری اشیاء به کار میروند. در زمینه موتوریسازی تخت بیمار، رباتهای متحرک میتوانند برای انتقال بیماران در راهروهای پیچیده بیمارستان با اجتناب از موانع و تأمین جابهجایی ایمن و کارآمد به کار روند. (برای مثال یک ربات به نام Robert از شرکت KUKA قادر است در توانبخشی به بیماران کمک کند، اینجا مشاهده کنید)
انواع چرخها — مرور کلی و معیارهای انتخاب
انتخاب نوع چرخ بیمارستانی تأثیر مستقیم بر توانایی ناوبری و مانور ربات دارد. تختهای بیمارستانی معمولاً از چرخ بیمارستانی معمولی (caster) استفاده میکنند؛ بنابراین انواع چرخ بررسیشده باید دو ویژگی مهم را داشته باشند:
حفظ راحتی بیمار با حرکت نرم و گردِشمانند چرخ دایرهای
حفظ امکان حرکت در همه جهات مشابه چرخ caster.
در این مقاله بر چرخهای معمولی، امنیویل و Mecanum تمرکز شده است. سیستمهای غیردَورانی مانند زنجیری یا مکانیزم واکر گنجانده نشدهاند، چون الزاماً برای کاربرد تخت مناسب نیستند.
چرخ معمولی Conventional
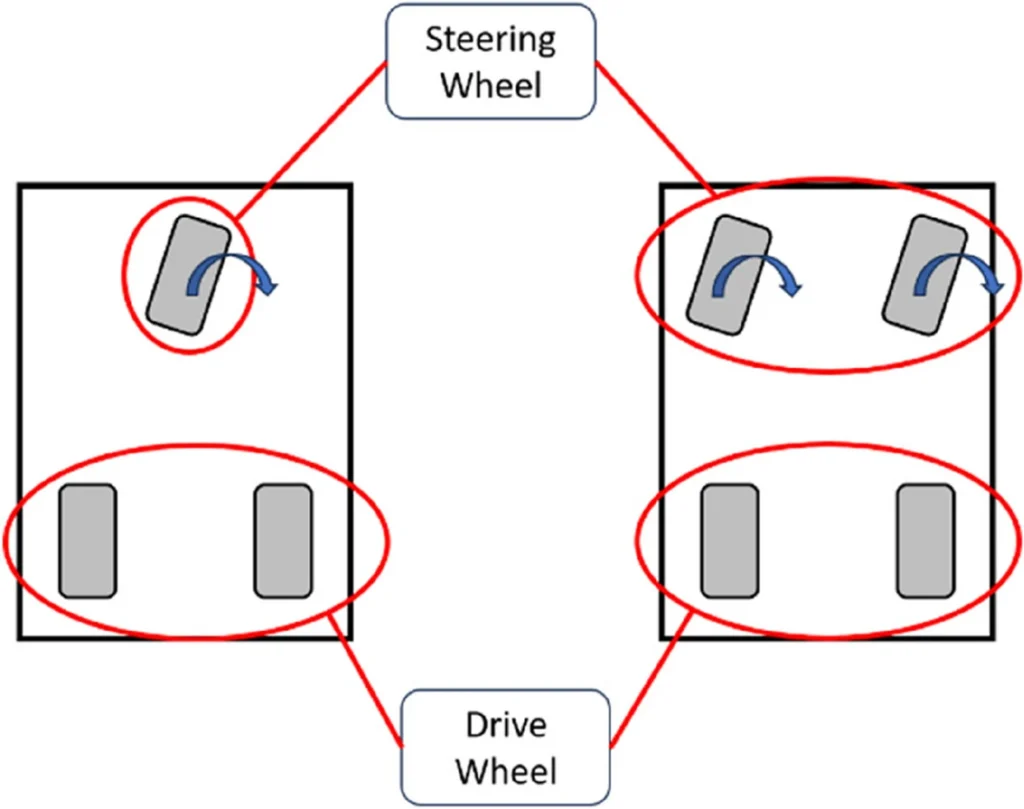
چرخهای معمولی در سیستمهای رانشی(درایوینگ سیستم ها) رایجاند و میتوان آنها را در پیکربندی دو تا چهار چرخ قرار داد. در پیکربندی چهارچرخ، چرخها در مربع یا مستطیل قرار میگیرند و چرخها ثابتاند و تنها حول محور شفت خود میچرخند. فرمان عموماً با اختلاف سرعت یا جهت چرخهای دو سمت بهدست میآید.
این نوع ساده است و نیاز به مکانیزم فرمان جداگانه ندارد؛ پایداری و کشش خوبی روی سطوح ناهموار فراهم میکند اما در تغییر جهت ممکن است سایش و اصطکاک (scrubbing) ایجاد کند که به فرسایش بیشتر چرخ میانجامد، همچنین در بخش های شلوغ بیمارستان کمی نا متعادل به نظر میرسد.
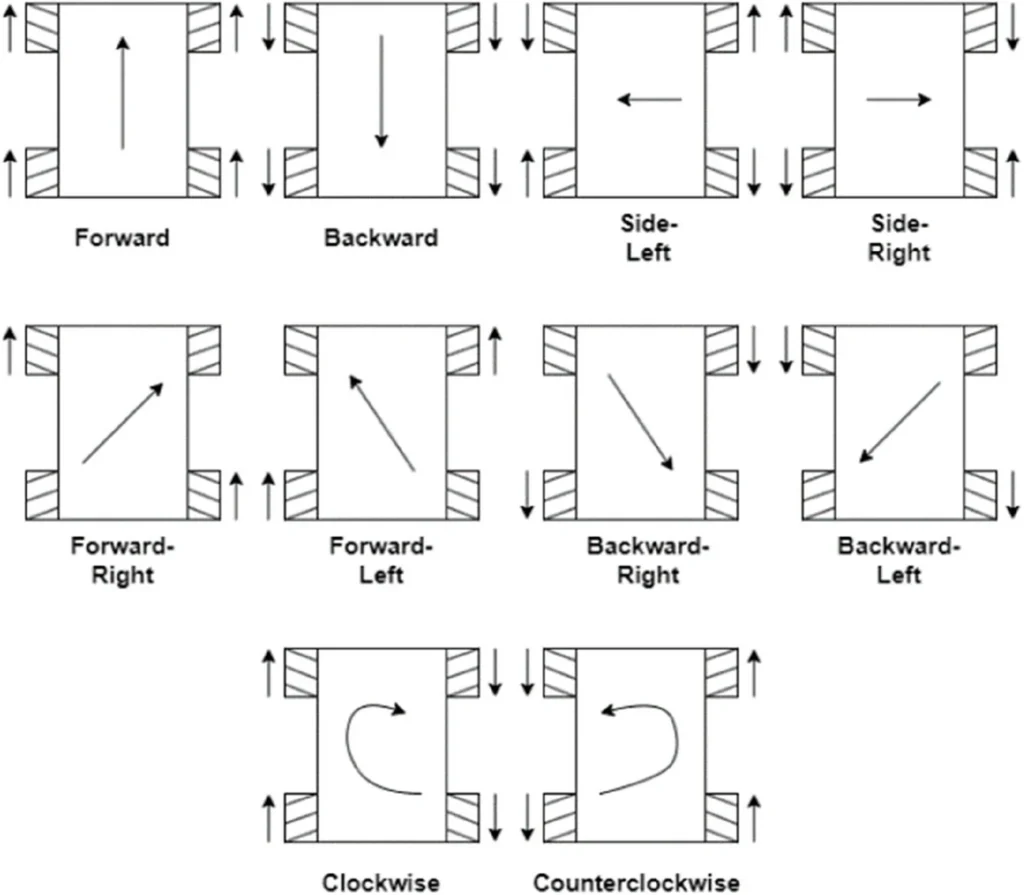
چرخ مکانوم Mecanum
چرخ Mecanum که توسط Bengt Ilon توسعه یافت، از رَولِرهایی تشکیل شده که در زاویهای (معمولاً 45°) نسبت به محور چرخ قرار دارند (مشابه آن را ممکن است در ماشین اسباب بازی کودکادن دیده باشید).

این طراحی امکان حرکت همهجهتی را فراهم میکند و در حرکت جلو و عقب راندمان خوبی دارد زیرا رفتار چرخ در راستای مستقیم همانند چرخ معمولی است. عملکرد این چرخها روی سطوح صاف بهتر است و روی سطوح ناهموار ممکن است رولرها تماس و کشش خود را از دست دهند و نیروی کششی کاهش یابد.
Omniwheel (اُمنیویل)
اُمنیویل یا چرخ یونیورسال از رولرهایی تشکیل شده که محور آنها عمود بر محور چرخ است و امکان حرکت آزاد در هر جهت را فراهم میآورد. معمولاً در پیکربندی سه یا چهار چرخ استفاده میشود و جهت نهایی با ترکیب برداری سرعت هر چرخ تعیین میشود.

طرحهای مختلف رولر (کوتاه یا بلند و منحنی) وجود دارد و بعضی طراحیها از دو یا چند لایه رولر برای پوشش سطح تماس استفاده میکنند تا نواحی بدون تماس کاهش یابد.
نکته: با توجه به فرم و مکانیزم چرخ های معرفی شده، سیستم ترمز و قفل این چرخ ها به سیستم انتقال قدرت متصل خواهد بود، این پیچیدگی عملیاتی، بر هزینه نهایی یک تخت بیمارستانی اثر زیادی خواهد داشت، اما با وجود این افزایش هزینه، بخش هایی از بیمارستان که شامل بیماران با وضعیت حاد میشود قطعا از این تکنولوژی سود خواهند برد، چرا که بیمار و اپراتور هر دو شرایط بهتری را تجربه خواهند کرد.
مقایسه انواع چرخها
هر نوع چرخ مزایا و معایب مشخصی دارد:
چرخ بیمارستانی caster: دوام و مقاومت بالا، تعویض و نگهداری آسان، شستشوی آسان و قیمت بسیار پایین تر.
چرخ معمولی کانونشنال: قابل اعتماد و بادوام، اما حرکت همهجهتی ندارد و در مانورهای پیچیده محدود است.
Omniwheel و Mecanum: انعطاف و مانورپذیری بالا روی سطوح صاف، اما کنترل پیچیدهتر و حساس به سطوح ناهموار.
میزان عملکرد نهایی نه تنها به نوع چرخ بلکه به پیکربندی و آرایش آنها بستگی دارد. جداول زیر خلاصهای از مزایا/معایب و پارامترهای فنی رایج بازار را نشان میدهند.
1 — مقایسه انواع چرخ (خلاصه)
| نوع چرخ | توضیحات | مزایا | معایب | رفرنس |
| چهار چرخ کانونشنال مستقل | هر چرخ مستقل به موتور متصل است و بهطور مستقل حرکت میکند | طراحی ساده و آسان برای استفاده، بهخصوص در وسایل کوچک | انعطافپذیری کمتر و دشواری مانور؛ فرسایش بالا | [24, 32, 34] |
| دو چرخ کانونشنال مستقل | هر چرخ مستقل به موتور متصل است؛ معمولاً جلو یا عقب قرار دارند | کنترل آسان، شتاب خوب، پایدار در سطوح صاف | ناپایداری در سطوح ناهموار، نیاز به کشش مناسب | [25, 32, 34] |
| Omniwheel امنیویل | چرخ با رولرهایی که عمود بر محور چرخ نصب شدهاند، حرکت آزاد در همه جهات را ممکن میسازد | بسیار انعطافپذیر و مانورپذیر روی سطوح صاف، کنترل آسان | نیاز به الگوریتم کنترل پیچیده؛ مناسب کارهای سرعت بالا یا سنگین نیست | [31, 32, 34] |
| Mecanum wheel چرخ مکانوم | رولرها با زاویه 45° نسبت به محور چرخ نصب شدهاند | انعطافپذیر و مانورپذیر روی سطوح صاف، پایدار و کنترلپذیر | کنترل پیچیدهتر، گرانتر از چرخ معمولی | [29, 32, 34, 35] |
2 — پارامترهای فنی رایج چرخها (خلاصه)
| نوع چرخ | کمترین قطر | بیشترین لود (کیلوگرم) |
| Conventional wheel | 50.8 mm | Up to 40-60 kg |
| Omniwheel | 101.6 mm | 2-30 kg |
| Mecanum wheel | 101.6 mm | 7-15 kg |
توجه: این پارامترها مقادیر رایجی در بازار هستند و ممکن است بین تولیدکنندگان و خریداران متفاوت باشند.
انواع سامانههای انتقال نیرو (Drivetrain)
سامانه درایوترین مجموعهای از اجزا و مکانیزمها است که حرکت ربات را ممکن میسازد. انواع رایج عبارتاند از: car drive، skid-steer، holonomic drive، Mecanum drive، H-drive و swerve drive. هر کدام ویژگیها، مزایا و معایب مخصوص خود را دارند و انتخاب بین آنها بستگی به نیازهای مانور، سطوح عملکرد و پیچیدگی کنترل دارد.
Car drive
در این روش چرخها موازی هم قرار میگیرند و حرکت مستقیم یا برگشتی را فراهم میکنند.فرمان با چرخانیدن مجموعهای از چرخها در جلو یا عقب حاصل میشود. سیستم ساده، قابل اطمینان و مناسب برای حرکات خطی و پیچهای کنترلشده است.
Skid-steer
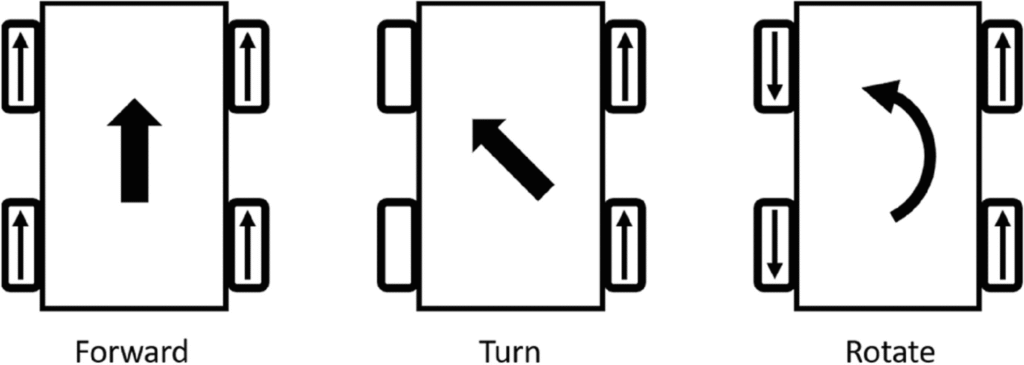
در اسکید-استیر چرخهای هر سمت بهطور مستقل کنترل میشوند و با اختلاف سرعت میان دو سمت، چرخش یا دوران روی نقطه حاصل میشود.این روش برای مانور در فضاهای تنگ مناسب است ولی باعث سایش چرخها و نیاز به کنترل دقیق جهت جلوگیری از فرسایش میگردد.
Holonomic drive
در هولونومیک از omniwheelها در آرایشی مثل مثلثی یا مربعی استفاده میشود تا حرکت همهجهتی بدون تغییر جهت خود چرخ فراهم شود.این سامانه نیازمند الگوریتمهای کنترل دقیق است ولی برای ناوبری داخلی و جاهایی که نیاز به موقعیتیابی سریع و چابک است مناسب است.
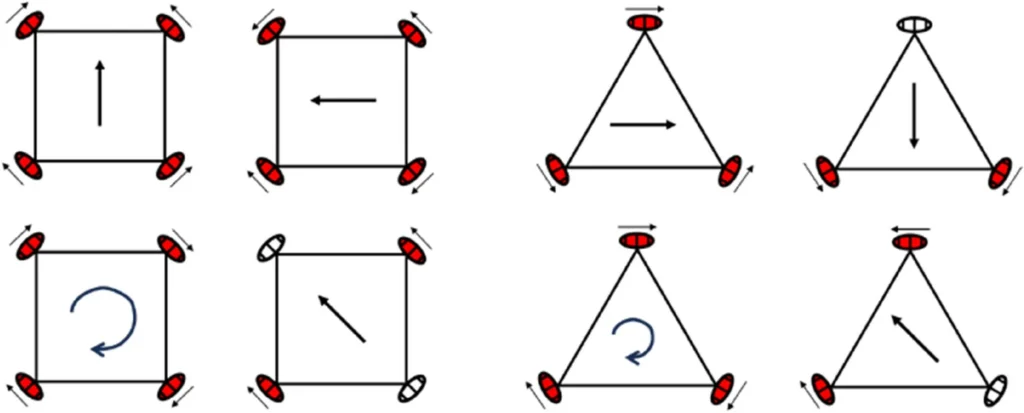
مکانیزم امنی ویل
Mecanum drive
استفاده از چهار چرخ Mecanum امکان حرکت مورب، جانبی و چرخش نرم را فراهم میسازد.مناسب برای کاربردهایی است که دقت موقعیتگذاری بالا میطلبند، اما طراحی و کنترل پیچیده و حساسیت به سطوح ناهموار از نواقص آن است.
H-drive
H-drive ترکیبی از مفاهیم skid-steer و هولونومیک است؛ شامل چرخهای مرکزی متعامد با چرخهای اصلی میشود که قابلیت پایین و بالا آوردن چرخهای مرکزی برای pivot را فراهم میکند. این ساختار پیچیدگی مکانیکی و کنترلی بیشتری دارد اما در فضاهای محدود مفید است.
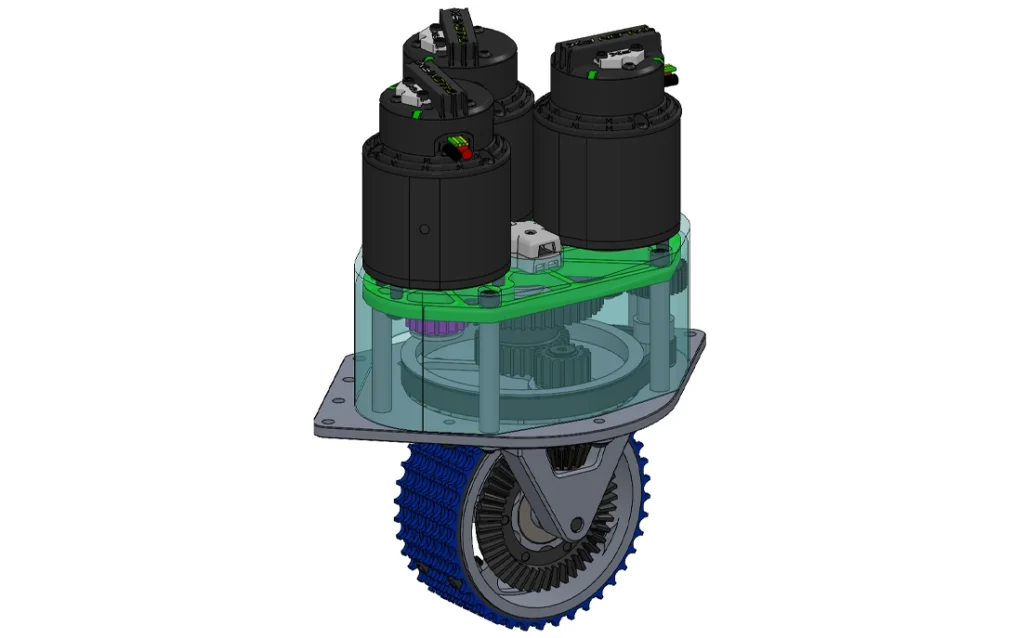
Swerve drive
در swerve drive هر چرخ هم رانش و هم فرماندهی مستقل دارد (نیاز به دو موتور برای هر ماژول: یک موتور برای چرخاندن چرخ و یک موتور برای جهتدهی). این سامانه دقت و مانور بسیار بالا فراهم میکند اما کنترل و هماهنگسازی هر ماژول پیچیده است و تعداد قطعات افزایش مییابد.
3 — مقایسه خلاصه درایوترینها
| نوع درایوترین | توضیحات | مزایا | معایب | رفرنس |
| Car drive | چرخها موازی و حرکت به جلو/عقب | ساده، قابلاطمینان، پایدار روی سطوح مختلف | محدود به حرکت جلو/عقب، غیر همهجهتی | [35, 38, 39] |
| Skid-steer | چرخها بهطور مستقل؛ چرخش با تفاوت سرعت | کنترل آسان، شتاب خوب، اجزای کمتر | حساس به سطوح ناهموار، نیاز به کشش خوب | [38, 39] |
| Holonomic drive | استفاده از 3–4 omniwheel، جهت با سرعت هر چرخ کنترل میشود | حرکت همهجهتی، مناسب ناوبری داخلی | نیازمند الگوریتم کنترل پیچیده | [28, 29, 40-43] |
| Mecanum drive | استفاده از چرخهای Mecanum برای حرکت همهجهتی | حرکت همهجهتی، موقعیتیابی دقیق، نصب آسان | طراحی پیچیده، حساس به سطوح ناهموار، نیازمند کنترل پیشرفته | [28, 29, 44, 46, 47] |
| H-drive | ترکیب skid-steer و اصول همهجهتی با چرخ مرکزی | قابلیت هیبرید برای فضاهای تنگ و چرخش دقیق | طراحی و کنترل پیچیده، ظرفیت بار محدود | [48, 49] |
| Swerve drive | هر چرخ قابلیت چرخش و رانش مستقل دارد | انعطافپذیری و مانور بالا، مناسب سطوح متنوع | کنترل پیچیده، نیاز به هماهنگی میان ماژولها | [32, 34, 58] |
الهام از کاربردها و دیگر صنایع
بررسی موارد موفق در حوزههای دیگر (لجستیک، تولید، کشاورزی) میتواند ایدههای مفیدی برای بهبود قابلیتهای تخت بیمارستانی ارائه دهد. دو نمونه برجسته:
Automated Guided Vehicle (AGV)
AGVها رباتهای باربری هدایتشدهاند که مسیرهای ازپیشتعریفشده را دنبال میکنند و برای حمل مواد در انبارها و خطوط تولید به کار میروند؛ عملکرد تکراری و حجم بالا را جایگزین نیروی انسانی میکنند.
Autonomous Mobile Robot (AMR)
AMRها توانایی ناوبری خودمختار در محیطهای متغیر را دارند و مجهز به حسگرهایی مانند دوربین، LIDAR و سنسورهای اولتراسونیکاند و قادر به برنامهریزی مسیر و اجتناب از موانع بهصورت پویا هستند. تفاوت کلیدی AMR با AGV در انعطافپذیری ناوبری است: AGV هنگام برخورد به مانع متوقف میشود؛ AMR مسیر جایگزین برنامهریزی میکند و از مانع عبور میکند.
کاربردهای AMR در حوزه سلامت شامل تحویل دارو و ملزومات، ضدعفونی با UV-C، مدیریت موجودی و جمعآوری پسماند است که زمان و تلاش نیروی انسانی را کاهش میدهد.

AGV in healthcare
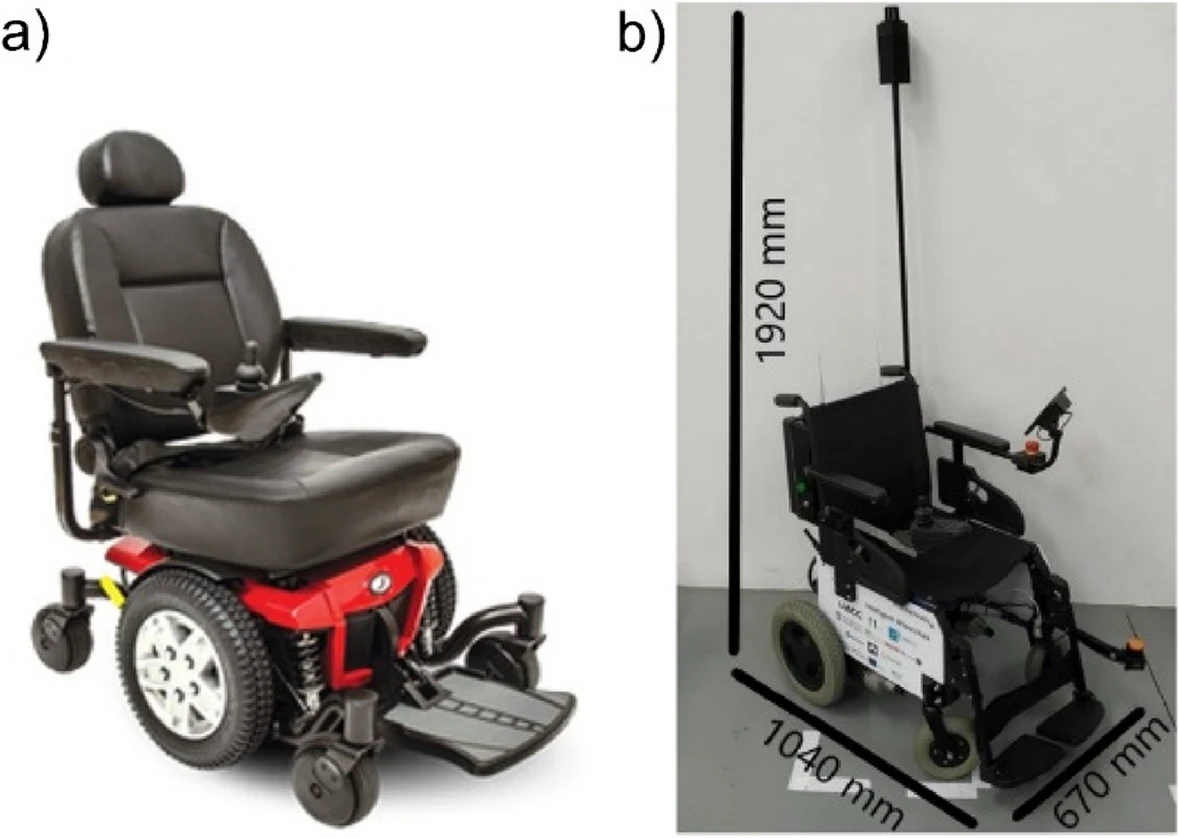
ویلچِر موتوردار و ویلچر خودران
ویلچرهای موتوردار برای کمک به افراد با محدودیت حرکت طراحی شدهاند و معمولاً با جویاستیک کنترل میشوند؛ برخی مدلها باتری قابل شارژ دارند. ویلچرهای خودران با حسگرها و الگوریتمهای نگاشت و مکانیابی میتوانند بهصورت مستقل حرکت کنند، موانع را تشخیص داده و مسیر بهینه را برنامهریزی کنند، و برای افزایش استقلال کاربران مفیدند.
فناوریهای موجود تخت بیمار موتوردار
تخت بیمار رباتیک
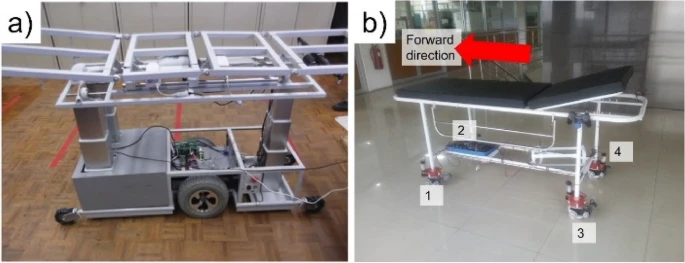
یک نمونه پروتوتایپ توسط Wang و همکاران طراحی شد که روی ناوبری، نگاشت و اجتناب از موانع تمرکز داشت، اما از دو چرخ دیفرانسیل برای حرکت استفاده کرد که مانور آن را محدود به سیستم غیرهولونومیک میکرد؛ این نشان میدهد که محیط پویای بیمارستان نیازمند قابلیتهای همهجهتی بیشتر است تا تخت بتواند بهراحتی در اطراف موانع و جمعیت حرکت کند.
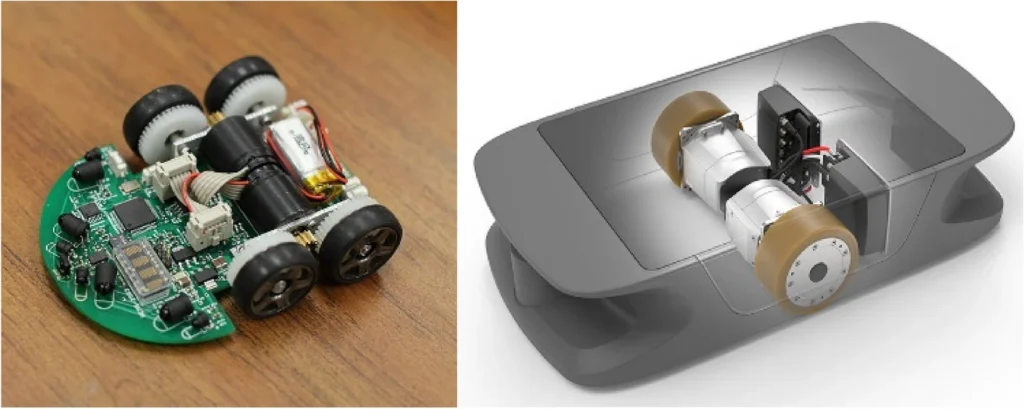
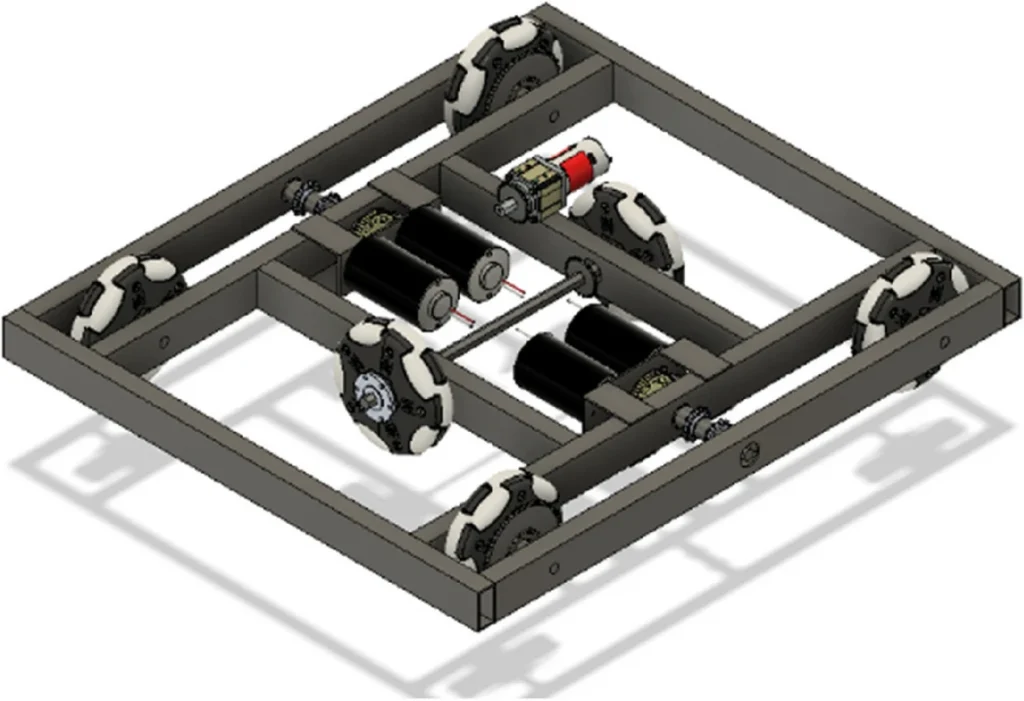
در تلاش برای کاهش هزینه، Dhelika و همکاران پروتوتایپی ساختند که چرخهای пасیو تخت را با ماژولهای swerve فعال چهارماژوله جایگزین کرد. بیشتر قطعات ماژولها با چاپ سهبعدی (PLA) ساخته شد و نیروی محرک از دو موتور DC برای هر ماژول تأمین میشد؛ کنترل از طریق یک جویاستیک بیسیم انجام میشد. Girindra و همکاران زمان مونتاژ ماژولها را با روش Boothroyd-Dewhurst ارزیابی کردند و برای افزایش دوام، برخی قطعات با آلومینیوم و استیل جایگزین شدند تا استحکام افزایش یابد.
تخت بیمارستانی رباتیک
اصلاح چرخ پنجم (Fifth wheel)
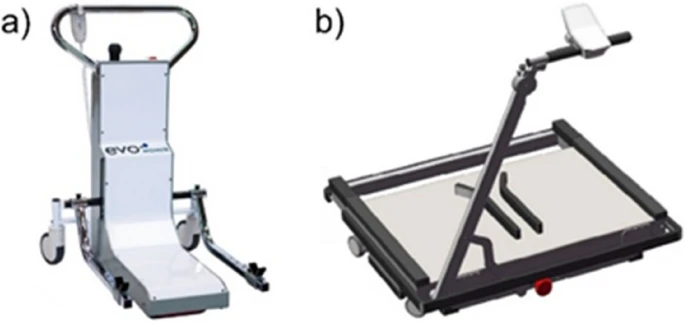
چرخ پنجم، یک چرخ فعال موتوردار افزوده به سیستم چهارچرخ пасیو است که معمولاً با یک موتور الکتریکی حرکت میکند تا تخت دستی را موتوردار سازد و تلاش لازم برای هل دادن تخت را کاهش دهد. این چرخ معمولاً قابلیت فرماندهی مستقل ندارد و هدایت تخت همچنان به اپراتور انسانی نیاز دارد؛ مزیت اصلی نصب آسان و عدم نیاز به تغییرات ساختاری عمده است. مثال تجاری توسط Hospimek نشان داده شده است که چرخ پنجم در مرکز تخت نصب شده و با یک کنترلر در دسترس اپراتور کنترل میشود.

تخت بیمارستانی با چرخ پنجم
Bed mover (حرکتدهنده تخت)
Bed mover دستگاهی است که برای جابجایی تختهای بیمار استفاده میشود و به جای تعویض تختها، تختهای موجود را حفظ و جابهجا میکند. عملکرد مشابه تراکتورهای بکسلزن در کارخانهها است. این دستگاه دارای نیروی فعال خود است و معمولاً با طراحی دوچرخ موتوردار عرضه میشود (شبیه نمونههای تجاری). نسخههای پیشرفتهتر مانند مفهوم ZED دارای قابلیت swerve و حرکت همهجهتی و کنترل از راه دور هستند که عملکرد بالاتری در مانور فراهم میکنند.
حرکت دهنده تخت بیمارستانی
4 — مقایسه فناوریهای موبایل تخت بیمار
| نوع تکنولوژی | توضیحات | مزایا | معایب |
| تخت بیمارستانی رباتیک | تخت بیمار طراحیشده با قابلیت حرکت خودکار و تنظیم موقعیت بدون مداخله دستی | قابلیت سفارشیسازی برای عملکردهای خاص، پیادهسازی اتوماسیون آسان | نیاز به ساخت از ابتدا، هزینه و پیچیدگی بیشتر |
| چرخ پنجم | چرخ پنجم موتوردار بهعنوان افزونه برای تختهای معمولی | نصب و راهاندازی آسان | فقط حرکتمحور؛ فرماندهی همچنان دستی است |
| حرکت دهنده تخت | تجهیزاتی برای بستن و کشیدن تختهای موجود | نیازی به تغییر تخت، جابجایی بین تختها، آسان در استفاده | نیاز به هدایت انسانی، نگهداری و فضای ذخیره جداگانه |
نتیجهگیری و توضیح کوتاه
قابلیت حرکت تختهای بیمارستانی عامل مهمی در کیفیت مراقبت از بیمار و سلامت کارکنان است. جابهجایی دستی تختها ناکارآمد، وقتگیر و فیزیکی پرتلاش است و میتواند خطرات و آسیب برای کارکنان ایجاد کند. بنابراین بررسی راهحلهایی که این بار را کاهش دهند ضروری است. پژوهشهای گذشته عمدتاً بر طراحی و ارگونومی متمرکز بودند، اما این کافی نیست. ورود رباتیک و سیستمهای خودکار نویدبخش حل بخشی از این مشکل است و مطالعات نشان دادهاند که کاربرد رباتیک میتواند فشار فیزیکی اپراتورها را کاهش دهد.
انتخاب نوع مناسب سیستم چرخ نقطه کانونی مهمی است؛ مقاله انواع چرخها و پیکربندیهای رانش را بررسی کرد و نشان داد هر گزینه مزایا و محدودیتهای خود را دارد که انتخاب نهایی بستگی به معیارهایی مانند مانورپذیری، کشش، پیچیدگی کنترل و هزینه دارد.
الهامگیری از موفقیتهای AGV و AMR در لجستیک و کاربردهای بهداشتی میتواند بینشهای ارزشمندی برای اتوماسیون در حوزه تخت بیمارستانی ارائه دهد. کاربردهای مشابه میتوانند بهرهوری را افزایش داده و هزینهها و خطرات را کاهش دهند.
در مجموع، حل چالشهای حرکت تخت بیمار نیازمند رویکردی چندبعدی است: ترکیب طراحی ساختاری، ارگونومی، رباتیک و اتوماسیون و انتخاب سیستم چرخ مناسب بر اساس نیازهای عملیاتی محیط بیمارستان.
چشمانداز توسعه آینده
پیشرفت فناوریها و زیرساختها در حرکت تخت بیمار انتظار میرود بهبودهای چشمگیری بیاورد: استفاده از سامانههای رباتیک پیشرفته با حسگرهایی مانند مسیر پیرو، اودومتری، مادونقرمز و LIDAR برای درک دقیقتر محیط و ناوبری خودکار یا یاریگرهای ناوبری؛ بهکارگیری هوش مصنوعی و یادگیری ماشین برای بهبود طرح مسیر، ایمنی و برنامهریزی پویا؛ بهبود رابط انسان-ماشین برای کنترل شهودیتر؛ ادغام با زیرساختهای بیمارستانی مانند سامانه پروندههای الکترونیک و سامانههای هوشمند برای مدیریت و ردیابی تختها؛ اتصال اینترنت اشیاء (IoT) برای پایش وضعیت تخت و علائم حیاتی بیمار بهصورت بلادرنگ؛ تاکید بر همکاری انسان-ربات و ویژگیهای ایمنی چون سیستمهای ترمز هوشمند و اجتناب از برخورد؛ و توجه به کارایی انرژی، پایداری و طراحی تکرارشونده مبتنی بر بازخورد کاربران.
لینک و منبع مقاله اصلی
در این لینک میتوانید لینک مقاله اصلی را مطالعه کنید، لازم به ذکر است که این مقاله ترجمه و اطلاح شده است.
- source: Rabbani et al., Journal of Engineering and Applied Science (2024), SpringerOpen






 چرخ بیمارستانی
چرخ بیمارستانی تخت بیمارستانی
تخت بیمارستانی تجهیزات پزشکی
تجهیزات پزشکی قطعات تجهیزات بیمارستانی
قطعات تجهیزات بیمارستانی ایده و برآورد هزینه
ایده و برآورد هزینه مدل سازی سهبعدی
مدل سازی سهبعدی آنالیز Moldflow
آنالیز Moldflow قالبسازی و تولید قطعه
قالبسازی و تولید قطعه ساخت جیگ و فیکسچر
ساخت جیگ و فیکسچر سوالات متداول
سوالات متداول